Introduction


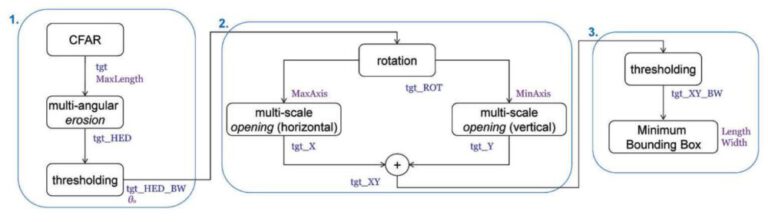
Implementing Workflow¶
Paper: https://www.tandfonline.com/doi/full/10.1080/2150704X.2016.1226522
Workflow:
T.o.C.:
- Preparation 0.1 Loading Data 0.2 Defining thresholding and plot functions
- Step 1: 1.1 Thresholding 1.2 Multi-Angular erosion 1.3 Thresholding
- Step 2: 2.1 Rotation 2.2 Multi-Scale Opening 2.3 Addition of results
- Step 3: 3.1 Thresolding 3.2 Minimim Bounding Boxes
- Export Results 4.1 Create Ship mask 4.2 Write Ship Mask to Band
import scipy.ndimage
import rasterio
import skimage.morphology
from matplotlib import pyplot as plt
import matplotlib
import numpy as np
import random
import matplotlib.pyplot as plt
from skimage import data
from skimage.filters import threshold_otsu
from numpy.ma import masked_array
import numpy.ma
from skimage.morphology import (erosion, dilation, opening, closing, white_tophat)
from skimage.morphology import black_tophat, skeletonize, convex_hull_image # noqa
from skimage.morphology import disk
import numpy as np
import numpy.ma as ma
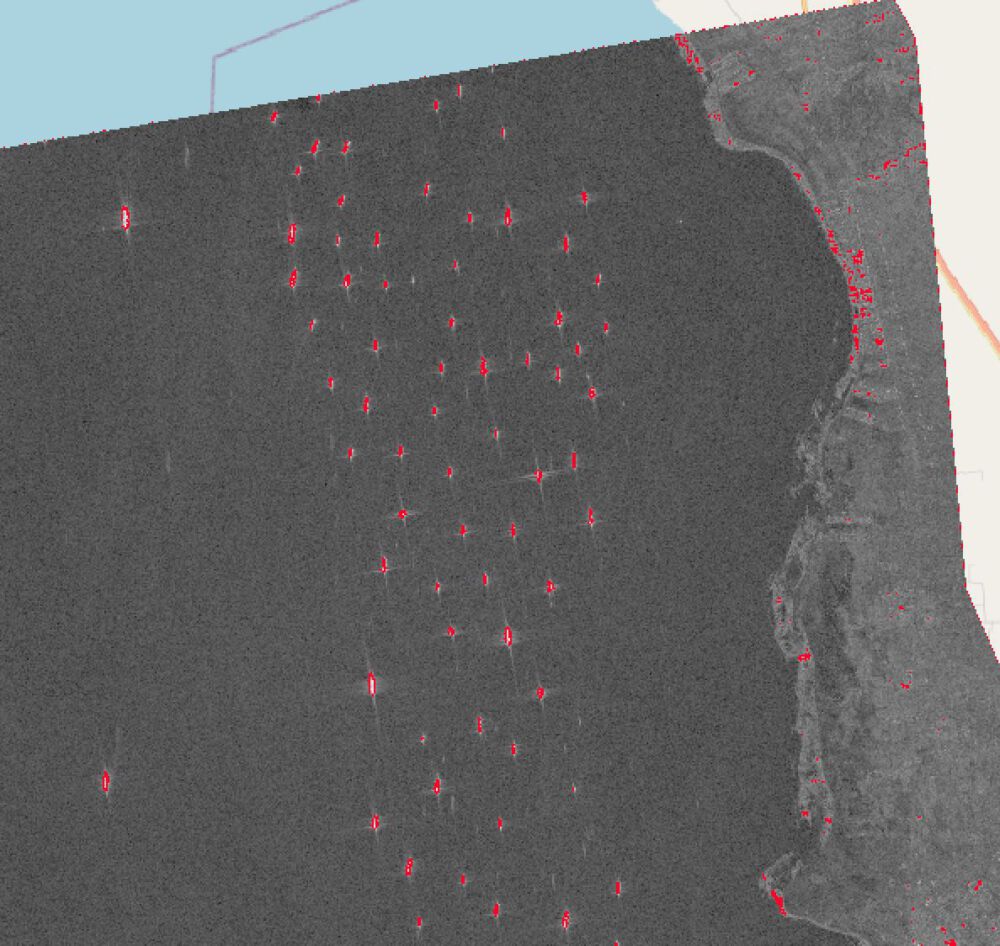
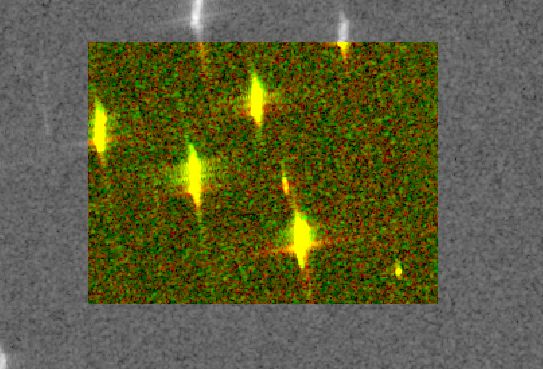
input_file_path = "data/test_data_crop.tif"
# Read image and raster
src = rasterio.open(input_file_path)
array = src.read(1)
plt.imshow(array,cmap="gray")
<matplotlib.image.AxesImage at 0x7efdea067490>

0.2 Defining thresholding and plot functions¶
def plot_comparison(original, filtered, filter_name):
fig, (ax1, ax2) = plt.subplots(ncols=2, figsize=(15, 10), sharex=True,
sharey=True)
ax1.imshow(original, cmap=plt.cm.gray)
ax1.set_title('original')
ax1.axis('off')
ax2.imshow(filtered, cmap=plt.cm.gray)
ax2.set_title(filter_name)
ax2.axis('off')
def otsu(array,plot):
image = array
thresh = threshold_otsu(image)
binary = image > thresh
if plot:
image_masked = np.multiply(image,binary)
fig, axes = plt.subplots(ncols=3, figsize=(15, 4))
ax = axes.ravel()
ax[0] = plt.subplot(1, 3, 1)
ax[1] = plt.subplot(1, 3, 2)
ax[2] = plt.subplot(1, 3, 3, sharex=ax[0], sharey=ax[0])
ax[0].imshow(image, cmap=plt.cm.gray)
ax[0].set_title('Original')
ax[0].axis('off')
ax[1].hist(image.ravel(), bins=256)
ax[1].set_title('Histogram')
ax[1].axvline(thresh, color='r')
ax[2].imshow(binary, cmap=plt.cm.gray)
ax[2].set_title('Thresholded Mask')
ax[2].axis('off')
plt.show()
#return image values only for True pixels
return(binary)
# test functions
plot_comparison(array, np.multiply(array,otsu(array,True)), "thresholded")


mask_step_1 = otsu(array,False)
image_masked_step_1 = np.multiply(array,mask_step_1)
1.2 Multi-Angular Erosion¶
Instead of 5° steps, 4 steps of 45° are implemented. (Note: how to get 5° slope in np?)
plot_comparison(array,erosion(image_masked_step_1,skimage.morphology.rectangle(10,5)),"Erosion Rectangle")

se_1 = np.array([[0,0,0,0,0,1,0,0,0,0],
[0,0,0,0,0,1,0,0,0,0],
[0,0,0,0,0,1,0,0,0,0],
[0,0,0,0,0,1,0,0,0,0],
[0,0,0,0,0,1,0,0,0,0],
[0,0,0,0,0,1,0,0,0,0],
[0,0,0,0,0,1,0,0,0,0],
[0,0,0,0,0,1,0,0,0,0],
[0,0,0,0,0,1,0,0,0,0],
[0,0,0,0,0,1,0,0,0,0],
])
se_2 = np.array([[1,0,0,0,0,0,0,0,0,0],
[0,1,0,0,0,0,0,0,0,0],
[0,0,1,0,0,0,0,0,0,0],
[0,0,0,1,0,0,0,0,0,0],
[0,0,0,0,1,0,0,0,0,0],
[0,0,0,0,0,1,0,0,0,0],
[0,0,0,0,0,0,1,0,0,0],
[0,0,0,0,0,0,0,1,0,0],
[0,0,0,0,0,0,0,0,1,0],
[0,0,0,0,0,0,0,0,0,1],
])
se_3 = np.array([[0,0,0,0,0,0,0,0,0,0],
[0,0,0,0,0,0,0,0,0,0],
[0,0,0,0,0,0,0,0,0,0],
[0,0,0,0,0,0,0,0,0,0],
[0,0,0,0,0,0,0,0,0,0],
[1,1,1,1,1,1,1,1,1,1],
[0,0,0,0,0,0,0,0,0,0],
[0,0,0,0,0,0,0,0,0,0],
[0,0,0,0,0,0,0,0,0,0],
[0,0,0,0,0,0,0,0,0,0],
])
se_4 = np.array([[0,0,0,0,0,0,0,0,0,1],
[0,0,0,0,0,0,0,0,1,0],
[0,0,0,0,0,0,0,1,0,0],
[0,0,0,0,0,0,1,0,0,0],
[0,0,0,0,0,1,0,0,0,0],
[0,0,0,0,1,0,0,0,0,0],
[0,0,0,1,0,0,0,0,0,0],
[0,0,1,0,0,0,0,0,0,0],
[0,1,0,0,0,0,0,0,0,0],
[1,0,0,0,0,0,0,0,0,0],
])
se_multiangle = [se_1,se_2,se_3,se_4]
for se,degree in zip(se_multiangle,["90°","45°","0°","135°"]):
plot_comparison(image_masked_step_1,erosion(image_masked_step_1,se),"10px flat Erosion at "+degree)




1.3 Thresholding¶
Since the Multi-Angular step does influence the resuts at the end, a thresholding at this level is not strictly necessary. Still, they are visualized. Also, the thresold method differs from the one used in the paper, which is most likely the reason for the less than ideal result after thresholding
for se,degree in zip(se_multiangle,["90°","45°","0°","135°"]):
plot_comparison(image_masked_step_1,np.multiply(erosion(image_masked_step_1,se),erosion(otsu(array,False),se)),"Thresholded - 10px flat Erosion at "+degree)




2.1 Rotation¶
Here, the authors rotate the matrix so that the main orientation of clusters is vertical. Since the ships in this image are already mainly vertical, there is no need to rotate it.
2.2 Multi-Scale (Horizontal and Vertical) Opening¶
Since the scale is "hard-coded" into this recreation of the workflow, the same scale as in the first step is used.
# Horizontal Opening
# erosion
pass_1 = erosion(image_masked_step_1,se_3)
# closing
horizontal_opening = dilation(pass_1,se_3)
# Result
plot_comparison(image_masked_step_1,horizontal_opening,"Horizontal Opening")

# Vertical Opening
# erosion
pass_1 = erosion(image_masked_step_1,se_1)
# closing
vertical_opening = dilation(pass_1,se_1)
# Result
plot_comparison(image_masked_step_1,vertical_opening,"Vertical Opening")

2.3 Addition of results¶
addition = np.add(horizontal_opening,vertical_opening)
plot_comparison(image_masked_step_1,addition,"Addition of horizontal and vertical Opening")

addition_thresholded = np.multiply(addition,otsu(addition,False))
plot_comparison(addition,addition_thresholded,"Threshold of Addition")

3.1 Remove last pixels?!¶
final = dilation(addition_thresholded,skimage.morphology.square(2))
plot_comparison(addition_thresholded,final,"Another Erosion")

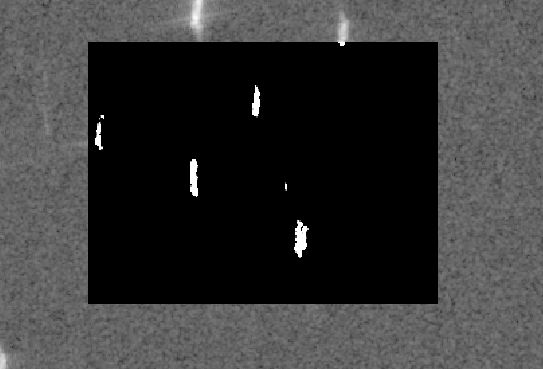
3.2 Minimum Bounding Box¶
ship_mask = ma.getmask(ma.masked_where(addition_thresholded < 0, addition_thresholded))
ship_mask = ship_mask.astype(int)
plt.imshow(ship_mask,cmap="gray")
<matplotlib.image.AxesImage at 0x7f5d9a9dbe90>

4.2 Write Ship Mask to Band¶
ToDo