M.Sc. Thesis: Deep Super-Resolution of Sentinel-2 Time Series
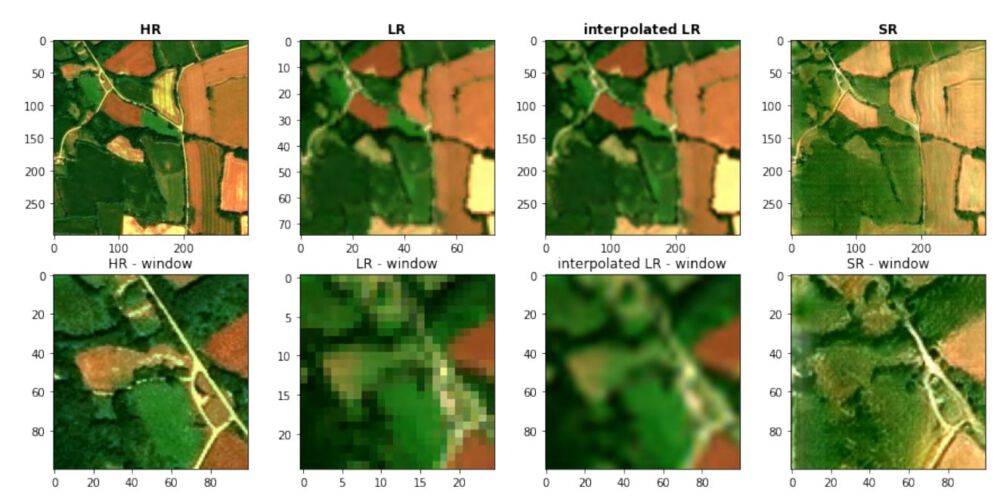
The M.Sc. thesis was resarched, written and defended at the University of South Brittany in Vannes, France between Februrary and June 2022.
Feature Extraction via Transfer Learning and using predefined Model Architectures for Palm Plantation Identification
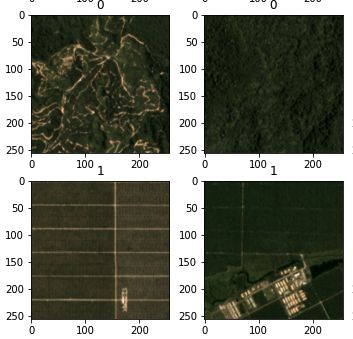
Several predefined deep learning computer vision models, such as LeNet, ResNet18, VGG16 and AlexNet are used to identify palm oil plantations in satellite images. The models are both trained from scratch and used as a feature extractor via transfer learning on the pretrained models.
Frequency Domain of Images – Fourier Transform and Filtering
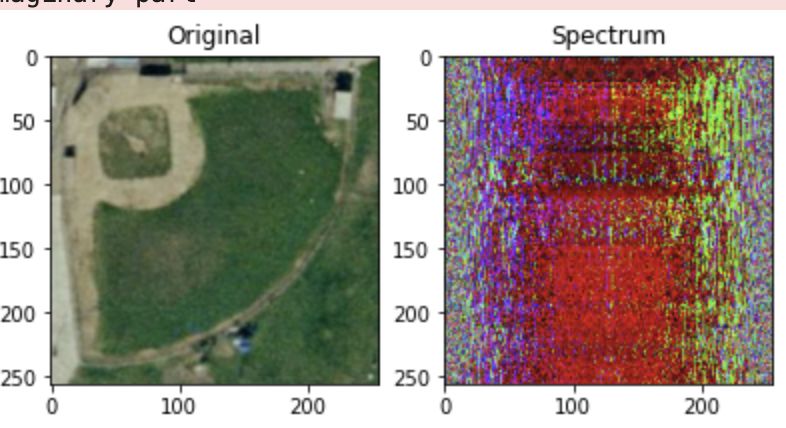
Performing some Fourier Transformations and filtering operations on images.
Image Features – Harris Corner and Hough Line Detection
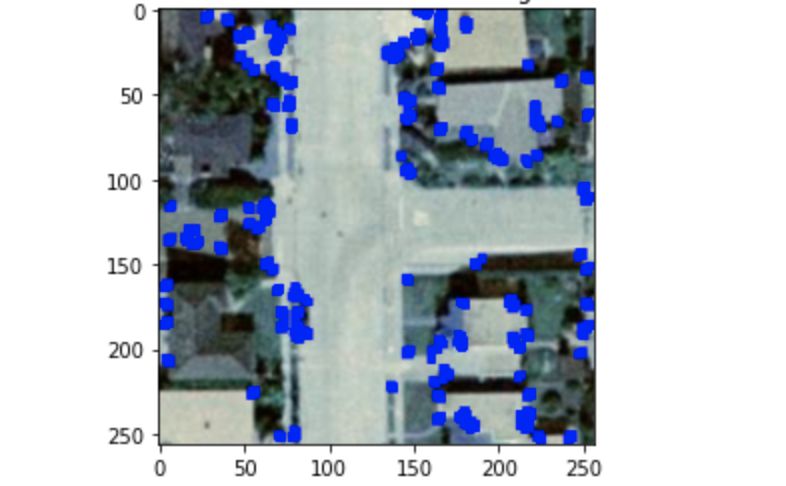
Performing edge extraction, Harris corner point identification and Hughes line detection. Additionally, a Haralick texture analysis is performed and a k-Nearest Neighbor approach tested basted on the texture information.
Geometric Transformation, different Interpolation Methods and Color Thresholding
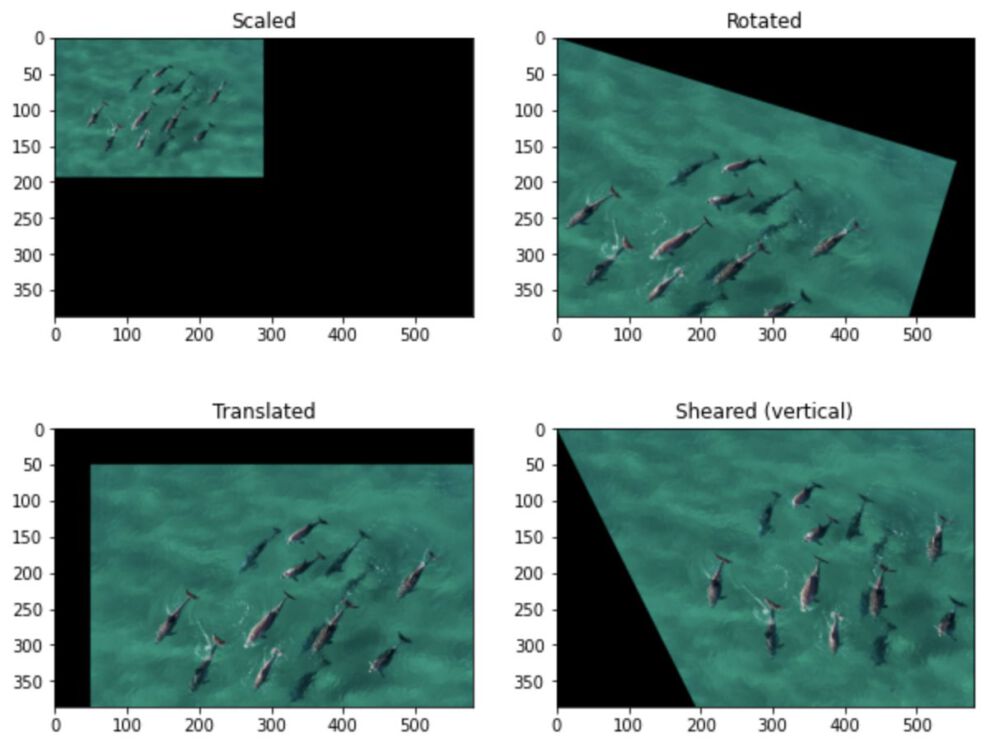
Performing different matrix manipulations to geometrically alter images and reproject the color in different color spaces.
Land Cover Classification based on different UAV-acquired data types

Following an UAV data acquisition, orthoimages for RBG, RE, and NIR bands as wel as a DSM are calculated. Different combinations of these images are fed into a classification algorithm to test how important each band is for the resulting classification.
Internship at German Aerospace Center
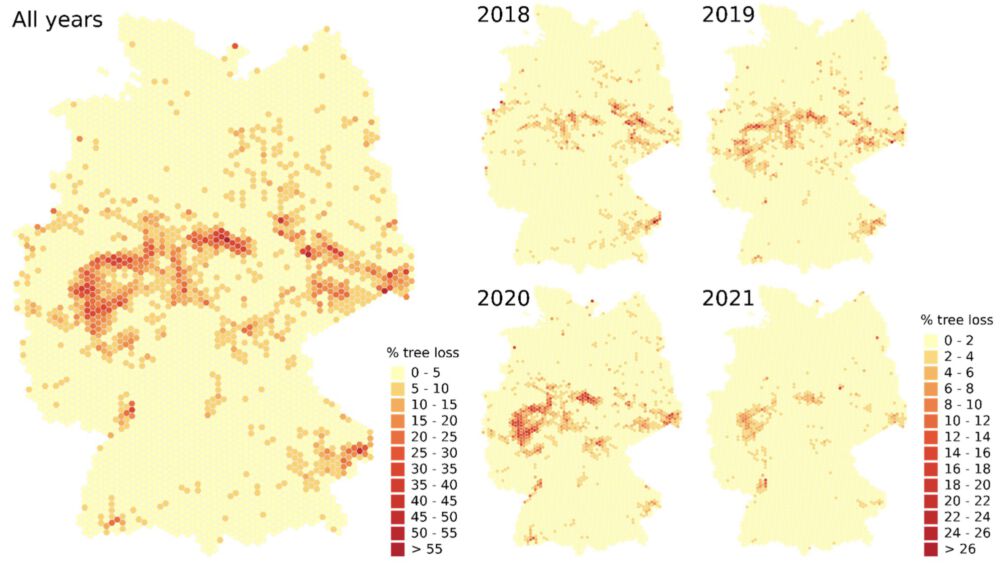
Report of Internship at German Aerospace Center, completed in 2021.
MapReduce for Hadoop via ‘mrjob’ in Python – Global Marine Traffic Dataset
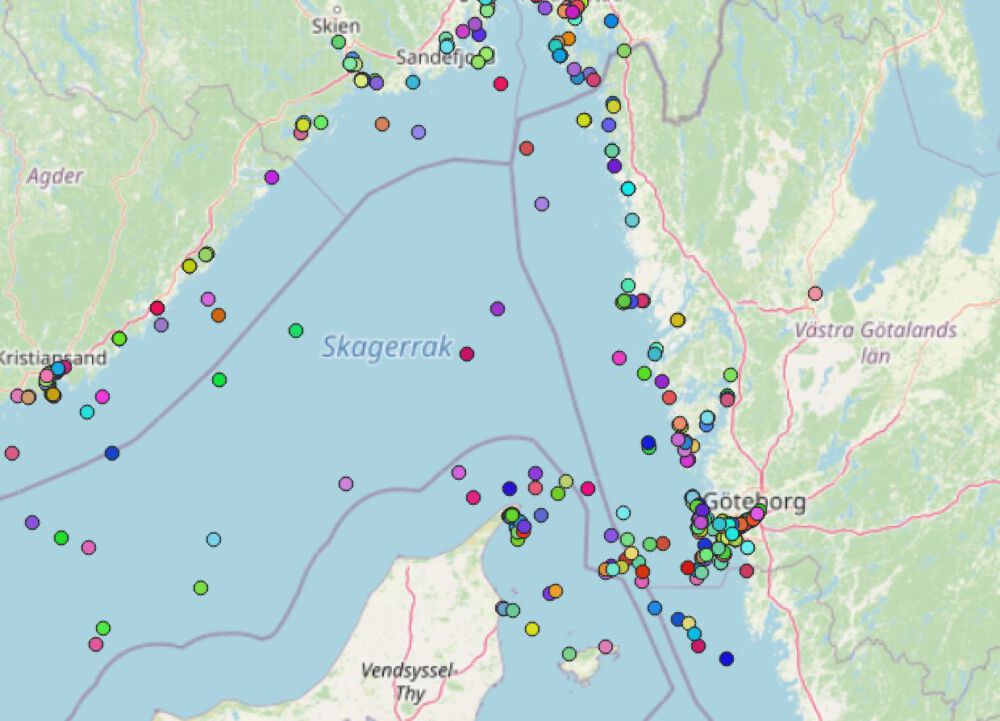
Based on the global marine traffic dataset, several MapReduce functions are implemented in Python via ‘mrjob’.
Gaussian Process Regression
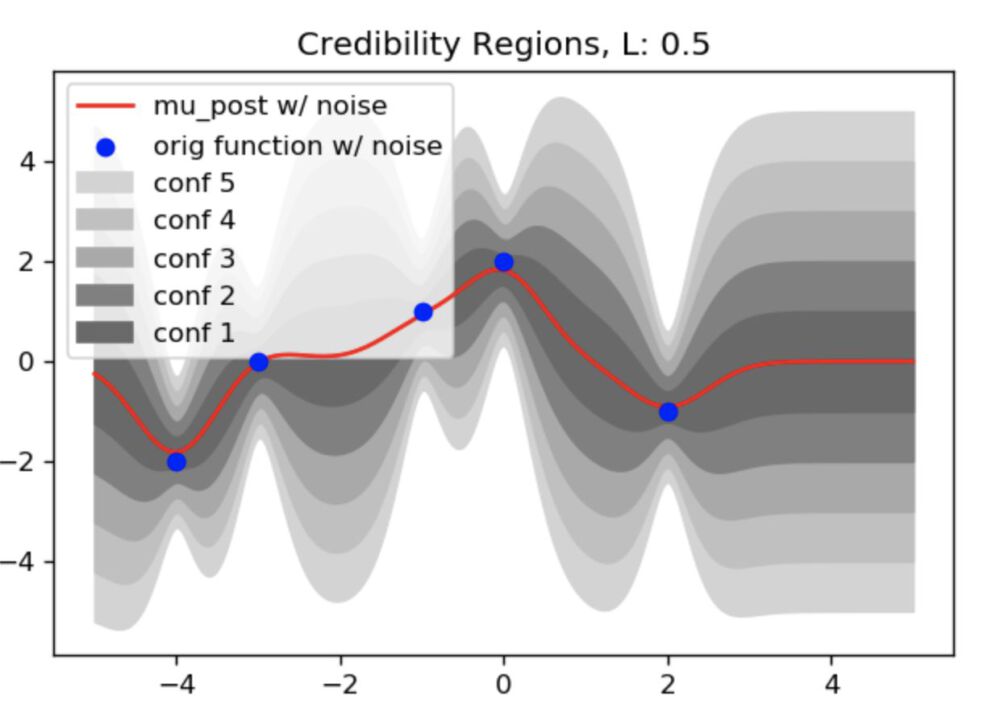
. In this notebook, Gaussian Process Regression is performed based on perfect and noisy data in order to show the basic principles behind the process.
LIDAR – CloudCompare Change Detection
In this project, two point clouds of the same suburb near Christchurch in New Zealand are loaded into CloudCompare and the difference in altitude is calculated.